



威恒电子电动夹爪WEF-MHZ2-20A-10-2N(步进伺服电机驱动型)在协作机器人机械臂上的零件夹取应用案例
一、前提摘要:
随着工业自动化的发展,协作机器人(Cobot)因其灵活性、安全性和易用性,在制造业中的应用越来越广泛。然而,协作机器人的末端执行器(如夹爪)的性能直接影响其作业效率和稳定性。传统的夹爪(如气动夹爪)存在依赖气源、控制复杂、维护成本高等问题,而电动夹爪凭借其高精度、易集成和智能化特点,成为协作机器人的理想选择。
威恒电子(Weiheng Electronics)作为国内领先的电动夹爪制造商,其产品在协作机器人领域表现优异。本案例以某汽车零部件制造企业为例,探讨威恒电子电动夹爪在协作机器人上的零件夹取应用,分析其工作原理、性能优势及实际应用效果。
二、工作原理:
威恒电子电动夹爪采用闭环控制的步进伺服电机驱动系统,其核心技术原理如下:
1.伺服电机驱动:通过内置伺服电机提供动力,电机接收控制信号后精确调节转速和扭矩,确保夹爪平稳运动。
2.闭环反馈控制:内置高精度编码器,实时监测夹爪位置和力度,确保夹取过程稳定可靠。
3.自适应抓取:部分型号支持力控模式,可根据工件形状自动调整夹持力,避免损伤精密零件。
4.模块化设计:支持快换接口,可适配不同协作机器人(如UR、Franka、ABB YuMi等),便于产线灵活调整。
相比传统气动夹爪,电动夹爪无需空压机,减少能源消耗,同时具备更精准的控制能力,适用于高精度装配、检测等场景。
三、电动夹爪VS气动夹爪 性能参数优势:
威恒电子电动夹爪在协作机器人应用中展现出多项技术优势,具体参数对比如下:
性能指标 | 威恒电动夹爪 | 传统气动夹爪 |
重复定位精度 | ±0.01mm | ±0.1mm |
控制方式 | 数字化(CAN/EtherCAT) | 气动阀控制 |
能耗 | 低(仅电机耗电) | 高(需空压机供气) |
维护成本 | 低(无气管磨损) | 高(需定期更换密封件) |
环境适应性 | 防尘、防油(IP54) | 易受油污影响 |
四、关键优势分析:
1.高精度与稳定性:±0.01mm的重复定位精度,适用于精密零件装配,如电子元件、小型轴承等。
2.智能力控:自适应行程,夹到物品就停止夹取。避免工件变形或划伤,特别适合易损件(如塑料件、玻璃制品)
3.快速响应:开合周期仅0.1秒,提高产线节拍,适用于高速分拣场景。
4.节能环保:无气源依赖,降低工厂能耗,符合绿色制造趋势。
五、实际应用成效
应用场景:汽车零部件装配线
某汽车零部件厂商在变速箱齿轮装配环节引入UR10e协作机器人+威恒电动夹爪,实现自动化上下料,具体成效如下:
1. 提升生产效率
传统人工操作节拍:15秒/件
机器人+电动夹爪节拍:8秒/件
效率提升46%,日均产量从2000件增至3000件。
2. 降低不良率
人工操作易因疲劳导致夹持力度不均,造成齿轮表面划伤(不良率约1.2%)。
电动夹爪力控模式下,不良率降至0.05%,年节省返工成本超50万元。
3. 柔性化生产通过更换夹爪模块,同一机器人可适配不同尺寸齿轮(直径10-50mm),换型时间<5分钟。
满足小批量多品种生产需求,减少设备投资。
4. 维护成本优化气动夹爪月均维护费用约2000元(气管更换、密封件损耗)。
电动夹爪仅需年度润滑,维护成本降低80%。
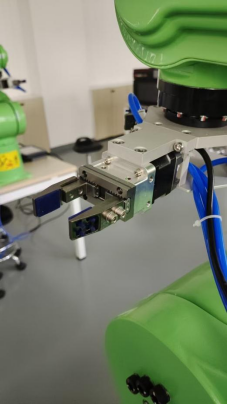
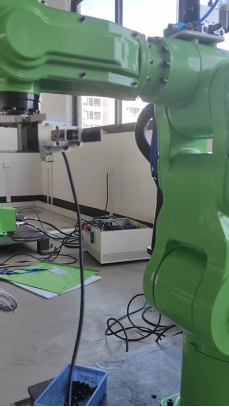
六、客户实际应用图:
威恒电子电动夹爪WEF-MHZ2-20A-10-2N(步进伺服电机驱动型)在协作机器人机械臂上的零件夹取应用案例
一、前提摘要:
随着工业自动化的发展,协作机器人(Cobot)因其灵活性、安全性和易用性,在制造业中的应用越来越广泛。然而,协作机器人的末端执行器(如夹爪)的性能直接影响其作业效率和稳定性。传统的夹爪(如气动夹爪)存在依赖气源、控制复杂、维护成本高等问题,而电动夹爪凭借其高精度、易集成和智能化特点,成为协作机器人的理想选择。
威恒电子(Weiheng Electronics)作为国内领先的电动夹爪制造商,其产品在协作机器人领域表现优异。本案例以某汽车零部件制造企业为例,探讨威恒电子电动夹爪在协作机器人上的零件夹取应用,分析其工作原理、性能优势及实际应用效果。
二、工作原理:
威恒电子电动夹爪采用闭环控制的步进伺服电机驱动系统,其核心技术原理如下:
1.伺服电机驱动:通过内置伺服电机提供动力,电机接收控制信号后精确调节转速和扭矩,确保夹爪平稳运动。
2.闭环反馈控制:内置高精度编码器,实时监测夹爪位置和力度,确保夹取过程稳定可靠。
3.自适应抓取:部分型号支持力控模式,可根据工件形状自动调整夹持力,避免损伤精密零件。
4.模块化设计:支持快换接口,可适配不同协作机器人(如UR、Franka、ABB YuMi等),便于产线灵活调整。
相比传统气动夹爪,电动夹爪无需空压机,减少能源消耗,同时具备更精准的控制能力,适用于高精度装配、检测等场景。
三、电动夹爪VS气动夹爪 性能参数优势:
威恒电子电动夹爪在协作机器人应用中展现出多项技术优势,具体参数对比如下:
性能指标 | 威恒电动夹爪 | 传统气动夹爪 |
重复定位精度 | ±0.01mm | ±0.1mm |
控制方式 | 数字化(CAN/EtherCAT) | 气动阀控制 |
能耗 | 低(仅电机耗电) | 高(需空压机供气) |
维护成本 | 低(无气管磨损) | 高(需定期更换密封件) |
环境适应性 | 防尘、防油(IP54) | 易受油污影响 |
四、关键优势分析:
1.高精度与稳定性:±0.01mm的重复定位精度,适用于精密零件装配,如电子元件、小型轴承等。
2.智能力控:自适应行程,夹到物品就停止夹取。避免工件变形或划伤,特别适合易损件(如塑料件、玻璃制品)
3.快速响应:开合周期仅0.1秒,提高产线节拍,适用于高速分拣场景。
4.节能环保:无气源依赖,降低工厂能耗,符合绿色制造趋势。
五、实际应用成效
应用场景:汽车零部件装配线
某汽车零部件厂商在变速箱齿轮装配环节引入UR10e协作机器人+威恒电动夹爪,实现自动化上下料,具体成效如下:
1. 提升生产效率
传统人工操作节拍:15秒/件
机器人+电动夹爪节拍:8秒/件
效率提升46%,日均产量从2000件增至3000件。
2. 降低不良率
人工操作易因疲劳导致夹持力度不均,造成齿轮表面划伤(不良率约1.2%)。
电动夹爪力控模式下,不良率降至0.05%,年节省返工成本超50万元。
3. 柔性化生产通过更换夹爪模块,同一机器人可适配不同尺寸齿轮(直径10-50mm),换型时间<5分钟。
满足小批量多品种生产需求,减少设备投资。
4. 维护成本优化气动夹爪月均维护费用约2000元(气管更换、密封件损耗)。
电动夹爪仅需年度润滑,维护成本降低80%。
六、客户实际应用图:

七、部门核心研发能力介绍:
广州市威恒电子有限公司电动夹爪部门,专注与电动夹爪的研发与生产,以创新驱动发展,为客户提供更可靠、更智能的电动夹爪解决方案。经过十余年的技术积累和市场验证,我们已发展成为协助机器人、自动化设备等领域机械臂夹爪解决方案的核心供应商。我们期待与更多行业伙伴合作,共同推动工业自动化水平的提升。
如需更详细的技术参数或定制服务,请联系威恒电子余工13825159505
八、结论:
威恒电子基于步进伺服电机的电动夹爪方案,通过创新的混合驱动技术和智能控制算法,在保持成本优势的同时实现了接近高端伺服系统的性能指标。在实际应用中证明:
1.在微小型精密装配场景,其±0.01mm的重复定位精度可满足绝大多数工业需求
2.比传统方案提升40%以上的能效比,符合绿色制造趋势
3.模块化设计支持快速适配主流协作机器人,部署时间<2小时
随着工业自动化向柔性化、智能化发展,这种兼具性能和成本优势的电动执行器解决方案,预计将在3C电子、医疗器械、精密仪器等领域获得更广泛应用。威恒电子将持续优化驱动算法,开发更大负载(200N级)的系列产品,以满足多样化市场需求。
七、部门核心研发能力介绍:
广州市威恒电子有限公司电动夹爪部门,专注与电动夹爪的研发与生产,以创新驱动发展,为客户提供更可靠、更智能的电动夹爪解决方案。经过十余年的技术积累和市场验证,我们已发展成为协助机器人、自动化设备等领域机械臂夹爪解决方案的核心供应商。我们期待与更多行业伙伴合作,共同推动工业自动化水平的提升。
如需更详细的技术参数或定制服务,请联系威恒电子余工13825159505
八、结论:
威恒电子基于步进伺服电机的电动夹爪方案,通过创新的混合驱动技术和智能控制算法,在保持成本优势的同时实现了接近高端伺服系统的性能指标。在实际应用中证明:
1.在微小型精密装配场景,其±0.01mm的重复定位精度可满足绝大多数工业需求
2.比传统方案提升40%以上的能效比,符合绿色制造趋势
3.模块化设计支持快速适配主流协作机器人,部署时间<2小时
随着工业自动化向柔性化、智能化发展,这种兼具性能和成本优势的电动执行器解决方案,预计将在3C电子、医疗器械、精密仪器等领域获得更广泛应用。威恒电子将持续优化驱动算法,开发更大负载(200N级)的系列产品,以满足多样化市场需求。

联系我们
光闸电机事业部:135-6036-5059 吕小姐
分选行业事业部:136-1004-3537 孔工
行业定制:138-2848-0507 陈工
公司固话:020-8319-0661


广州市番禺区大石街道会江深蓝工业园11栋5楼